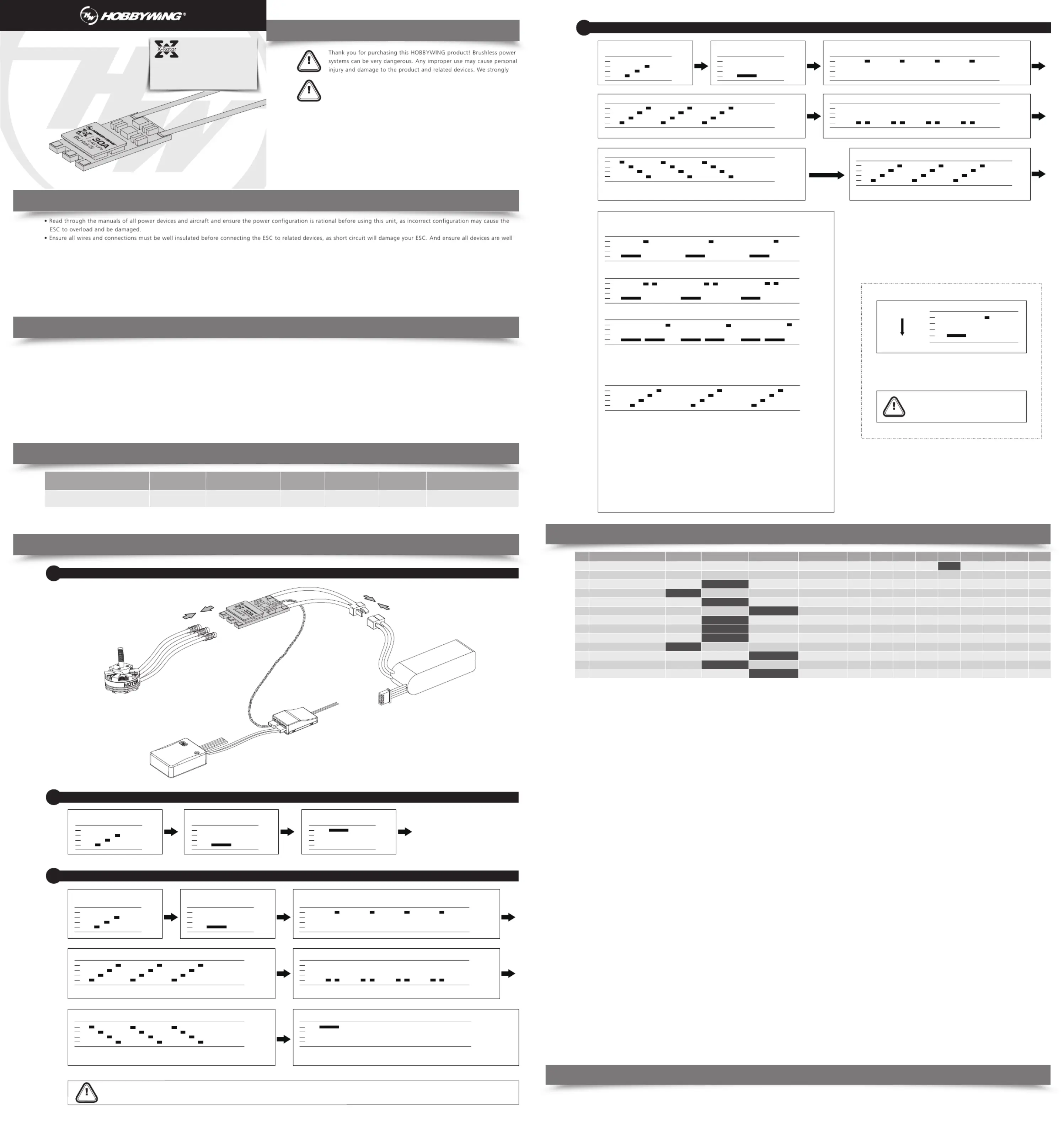
Hobbywing XRotor Micro BLHeli-s 30A DShot600 Manual
Hobbywing
Radiostyret legetøj
XRotor Micro BLHeli-s 30A DShot600
| Mærke: | Hobbywing |
| Kategori: | Radiostyret legetøj |
| Model: | XRotor Micro BLHeli-s 30A DShot600 |
| Bredde: | 23.8 mm |
| Dybde: | 14.5 mm |
| Højde: | 5.8 mm |
| Vægt: | 6 g |
| Produktfarve: | Sort |
| Produkttype: | Hastighedsregulator |
| Batteriteknologi: | Lithium polymer (LiPo) |
| Normal brug: | Quadrokopter |
| Mærke kompatibilitet: | Hobbywing |
| Strøm (maks.): | 40 A |
| AWG-ledningsstørrelse: | 18 |
Har du brug for hjælp?
Hvis du har brug for hjælp til Hobbywing XRotor Micro BLHeli-s 30A DShot600 stil et spørgsmål nedenfor, og andre brugere vil svare dig
Radiostyret legetøj Hobbywing Manualer

29 September 2025

28 September 2025

28 September 2025

18 August 2025

17 Juli 2025

9 Juli 2025

8 Juli 2025

29 Marts 2025

29 Marts 2025

28 Marts 2025
Radiostyret legetøj Manualer
- Jada
- Conrad
- Flyzone
- Axial
- Spektrum
- Amewi
- Jamara
- Robbe
- Chicco
- Force Engine
- HPI Racing
- Biltema
- JETI
- Hitec
- JR
Nyeste Radiostyret legetøj Manualer
10 November 2025

29 Oktober 2025

27 Oktober 2025

26 Oktober 2025
27 September 2025

27 September 2025
23 September 2025
15 September 2025

14 September 2025

14 September 2025